0. 写在最前面
希望大家收藏:
本文持续更新地址:
左侧专栏还在更新其他ROS实用技巧哦,关注一波?
在使用ROS进行机器人控制的时候,有时候会希望能够显示并且保留机器人的历史运动轨迹,比如最近在做行人跟踪,就希望能够保留多个行人的轨迹以及机器人的运动。本文将会介绍网上搜罗到的各种方法,并粗略比较一些优劣。
github地址:
喜欢的帮我github点个赞,点个关注呗~~~~
1. visualization_msgs/Marker
如名字所示,就是画出可视化的标志物。利用Marker有两种方法可以实现画出轨迹。相对于后面的方法来说,使用Marker可以有丰富的形状选择。首先看这个类包含的成员:
//各种标志物类型的定义,每一个的具体介绍和形状可以到这里查看:http://wiki.ros.org/rviz/DisplayTypes/Markeruint8 ARROW=0//箭头uint8 CUBE=1//立方体uint8 SPHERE=2//球uint8 CYLINDER=3//圆柱体uint8 LINE_STRIP=4//线条(点的连线)uint8 LINE_LIST=5//线条序列uint8 CUBE_LIST=6//立方体序列uint8 SPHERE_LIST=7//球序列uint8 POINTS=8//点集uint8 TEXT_VIEW_FACING=9//显示3D的文字uint8 MESH_RESOURCE=10//网格?uint8 TRIANGLE_LIST=11//三角形序列//对标记的操作uint8 ADD=0uint8 MODIFY=0uint8 DELETE=2uint8 DELETEALL=3Header headerstring ns //命名空间namespace,就是你理解的那样int32 id //与命名空间联合起来,形成唯一的id,这个唯一的id可以将各个标志物区分开来,使得程序可以对指定的标志物进行操作int32 type //类型int32 action //操作,是添加还是修改还是删除geometry_msgs/Pose pose # Pose of the objectgeometry_msgs/Vector3 scale # Scale of the object 1,1,1 means default (usually 1 meter square)std_msgs/ColorRGBA color # Color [0.0-1.0]duration lifetime # How long the object should last before being automatically deleted. 0 means foreverbool frame_locked # If this marker should be frame-locked, i.e. retransformed into its frame every timestep#Only used if the type specified has some use for them (eg. POINTS, LINE_STRIP, ...)geometry_msgs/Point[] points//这个是在序列、点集中才会用到,指明序列中每个点的位置#Only used if the type specified has some use for them (eg. POINTS, LINE_STRIP, ...)#number of colors must either be 0 or equal to the number of points#NOTE: alpha is not yet usedstd_msgs/ColorRGBA[] colors# NOTE: only used for text markersstring text# NOTE: only used for MESH_RESOURCE markersstring mesh_resourcebool mesh_use_embedded_materials
1.1 使用lifetime实现
每次获取到机器人的位姿后,就在对应点发布一个标志,然后将lifetime设为0,也就是无限久地保存~~但是需要注意一点,让ns或者id变量每次都不一样,否则ns和id一直一样的话,后面的操作会覆盖前面的操作,也就一直只能看到最新的了。建议每次让id+=1。代码见marker.cpp,这个是稍微修改了的代码。大家不要被颜色形状什么的干扰~~~我只是懒得调。

1.2 使用标志序列或者点集实现
这个没啥好说的,程序都是copy。但这个有个不好的是,如果时间比较久,需要保存一个很长的数组来存储历史轨迹的坐标。见marker_list.cpp
2. nav_msgs/Path
这个功能是利用rviz中的Path类型实现的,只需要发布nav_msgs/Path类型的消息,然后在rviz上订阅该消息就可以显示轨迹路径。而nav_msgs/Path类型的数据很简单,就是一个位姿的集合。navigation功能包集中显示规划路径用的就是这个东西。
这个有点像Marker中的序列和点集一样,需要维护一个数组。在rviz中可以对路径的颜色、宽度、透明度等进行设置,另外可以设置显示箭头和坐标。最终显示的结果根Marker差不多,个人感觉是简单方便,不用想这么多。代码见path.cpp
//nav_msgs/Path数据类型 Header header geometry_msgs/PoseStamped[] poses //类型扩展: Header header uint32 seq time stamp string frame_id geometry_msgs/PoseStamped[] poses Header header uint32 seq time stamp string frame_id geometry_msgs/Pose pose geometry_msgs/Point position float64 x float64 y float64 z geometry_msgs/Quaternion orientation float64 x float64 y float64 z float64 w
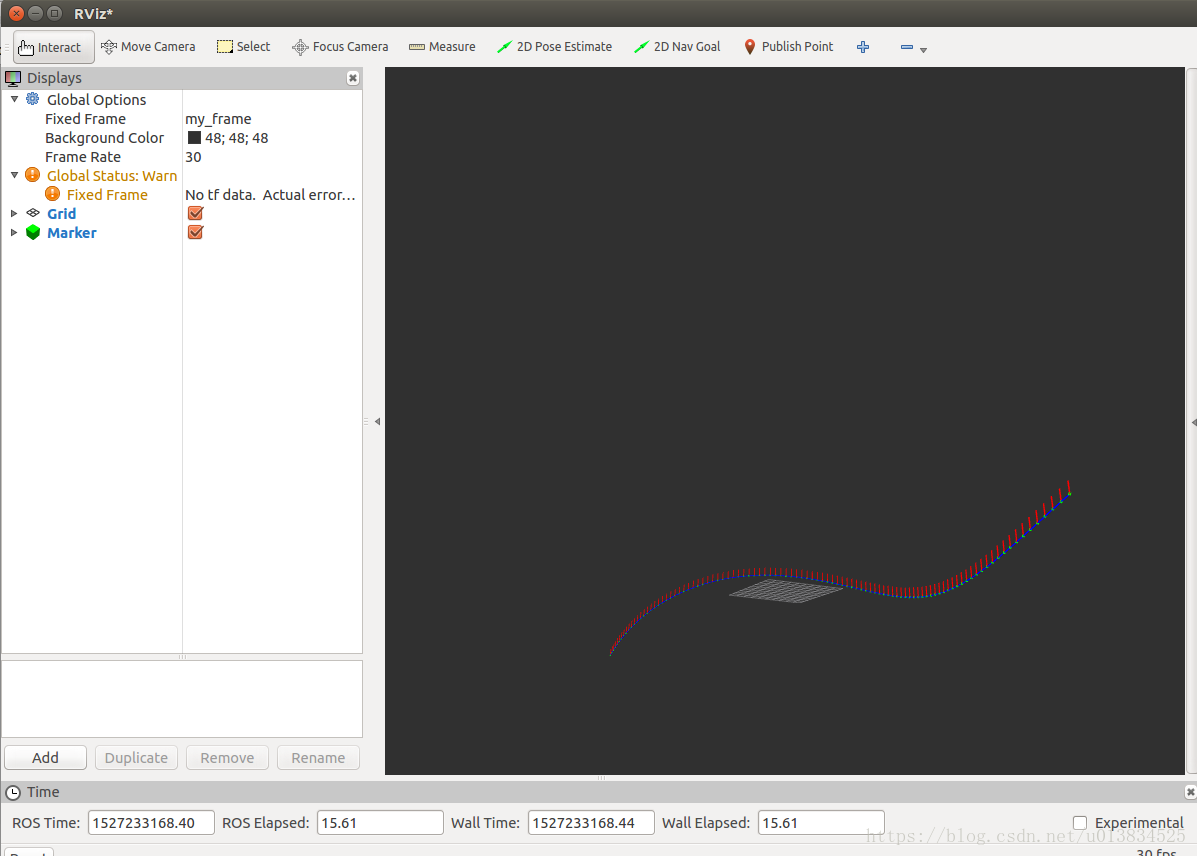
效果图:

3. 未完待续
看到github上一个开源项目,上面有更多可视化的图形~~~~有兴趣可以取看看:
nav_msgs/Odometry也可以~~只需要发布好里程计数据(一般从轮子运动模型或者IMU或者视觉里程计,激光雷达里程计等发布)。然后在rviz中添加这个odometry就可以了。keep选多一点,这个是rviz会帮你缓存的数据量。length即向量的长度,选择合适的即可。注意要将你的Fixed Frame选择为odom的坐标系才会显示。
参考